第九章 ROS-RTSP流相机功能包¶
我们在做图像处理的时候,尤其在ROS环境下面,需要图像数据,网口的摄像头市面上比较多,技术也相对比较成熟。网络摄像头一般, 都支持RTSP的流媒体协议流。下面的操作是基于一个网口摄像头的RTSP摄像头和一台机载计算机接入图数传,机载计算机通过网口, 读取和解析RTSP的数据流成标准的ROS的image消息,有了这个消息一些ROS包里面的一些图像处理算法可以直接使用。
9.0 测试软件环境¶
1.ubuntu 18.04
2.ROS melodic
3.RTSP流相机-ROS功能包
rocon_rtsp_camera_relay
WIKI:http://wiki.ros.org/rocon_rtsp_camera_relay
源码:https://github.com/robotics-in-concert/rocon_devices
备注:软件版本并非强制,可自行测试。
9.1 创建工作空间¶
打开新终端
mkdir -p rtsp_ws/src
cd rtsp_ws/src
git clone https://github.com/robotics-in-concert/rocon_devices.git
cd ..
catkin_make
打开新终端
gedit .bashrc
//文档末尾添加,保存,关闭
source ~/rtsp_ws/devel/setup.bash
source ~/.bashrc
9.2 修改launch文件¶
打开新终端
//修改launch
cd ~/rtsp_ws/src/rocon_devices/rocon_rtsp_camera_relay/launch/
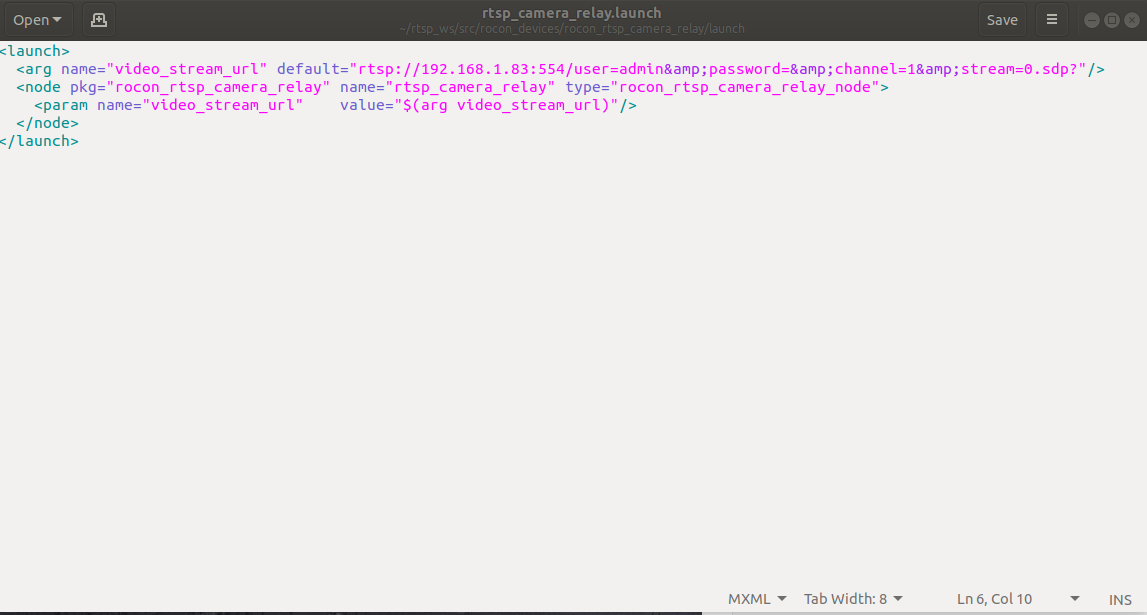
gedit rtsp_camera_relay.launch
添加RTSP链接,提供如下修改示例
default="rtsp://192.168.1.83:554/user=admin&password=&channel=1&stream=0.sdp?"
- 修改后的launch文件如下图:
9.3 启动ROS节点¶
打开新终端
//运行launch,启动ROS节点
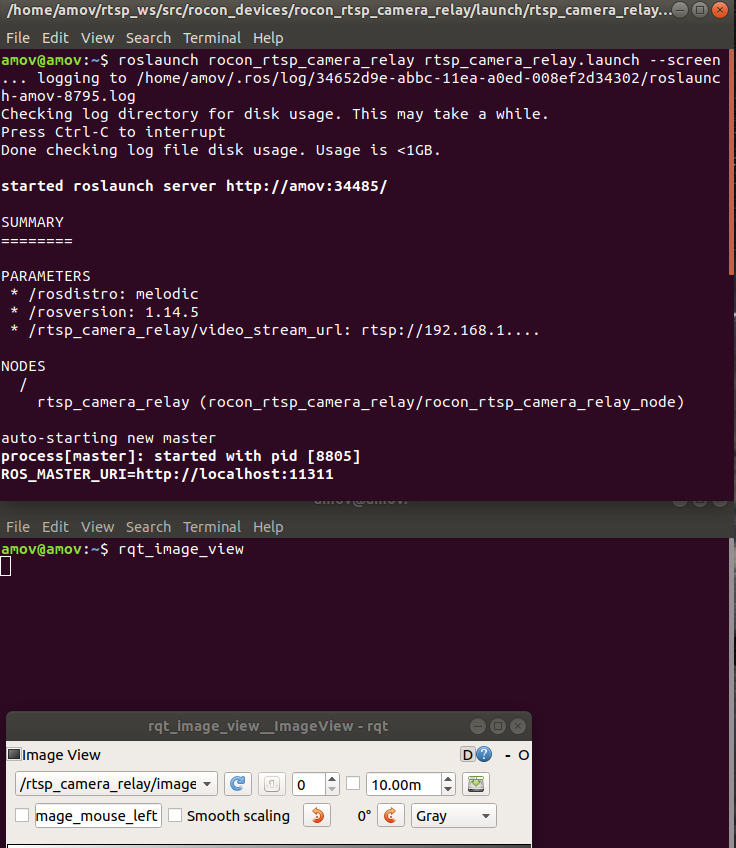
roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen
可以再打开一个新终端,查看发布的图像话题
rqt_image_view
- 效果如下:
- 帧率和消息如下:
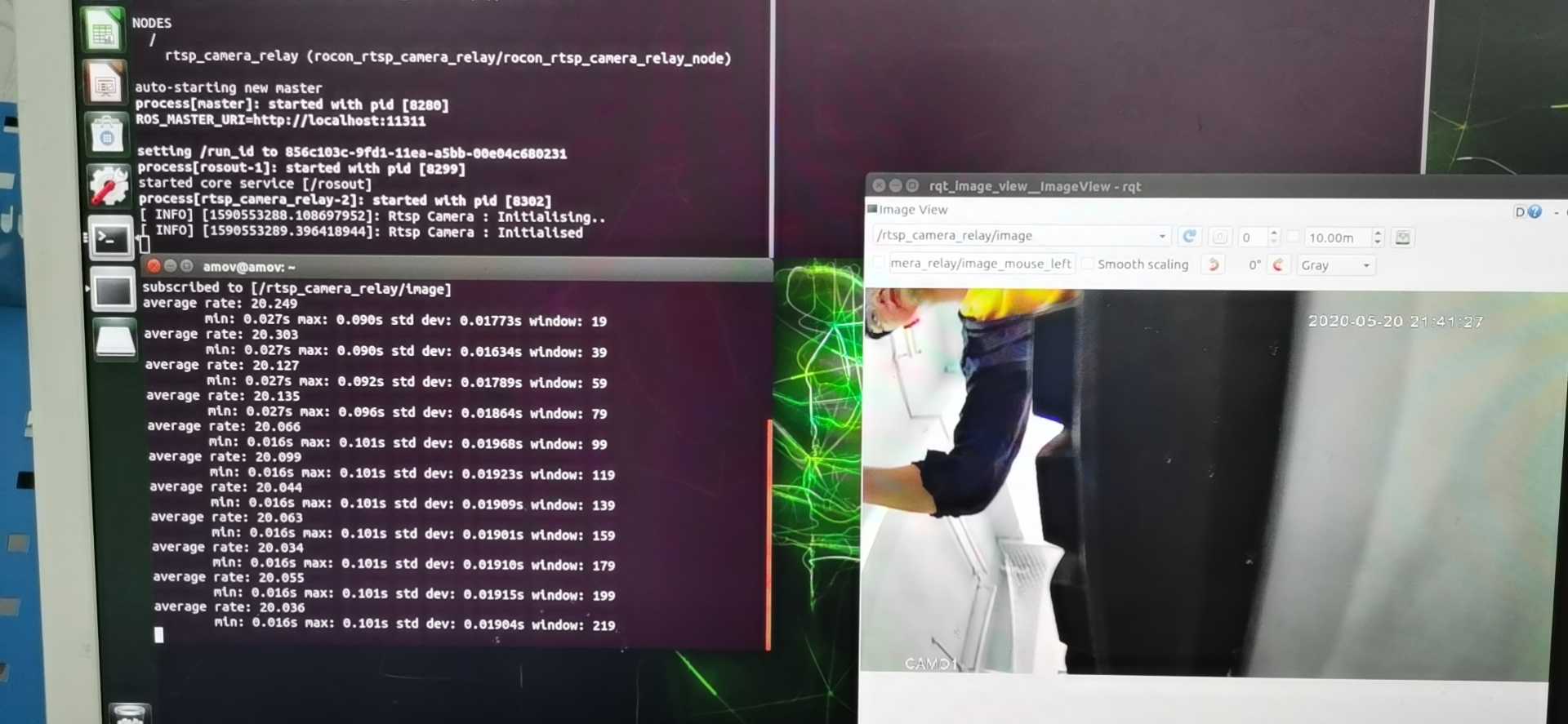
20帧率左右,RTSP还是可以配置的,应该可以达到更高的帧率。还有就是在TX2下面测试,会占用额外的CPU使用率5%/10%左右。